Vr Mapping |
ON-LINE REFERENCE DOCUMENTATION CARDINAL SYSTEMS, LLC |
Drive KML (DriKml or DriGoo)
Type: Viewing application
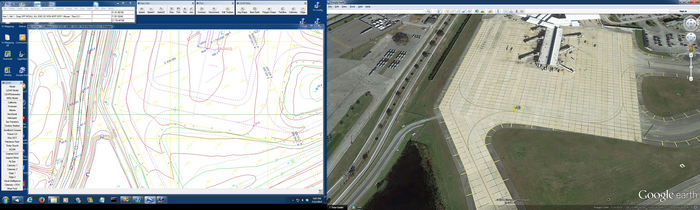
Drives to a point in a Keyhole Markup Language (KML) virtual globe compatible program such as Google Earth, The "drive to" point is selected in VrOne, VrTwo or VrThree (VrLiDAR).
Detailed Description
The Keyhole Markup Language (KML) is an XML notation for expressing geographic annotation and visualization within earth browsers. Support for KML is provided by programs such as Google Earth. This allows locations in the earth program to be driven to from other sources such as Vr Mapping.
KML viewing parameters which is how the point is viewed when driven to may be defined. Also, the local "drive to" coordinates may have a shift and (or) scale factor applied before converting to KML coordinates.
Prerequisites
An KML compatible program must be installed on the same computer running Vr Mapping and the name and location of the program must be defined in the parameters.
The coordinate projection of the VrOne file must be defined. If multiple VrOne files (workspaces) are open then each file should have it's coordinate projection defined. The coordinate projection of a VrOne file may be defined under the File pull-down -> Edit Vr Header -> Coordinate projection. If the VrOne file coordinate projection is not defined or defined incorrectly then the KML program will drive to the wrong location.
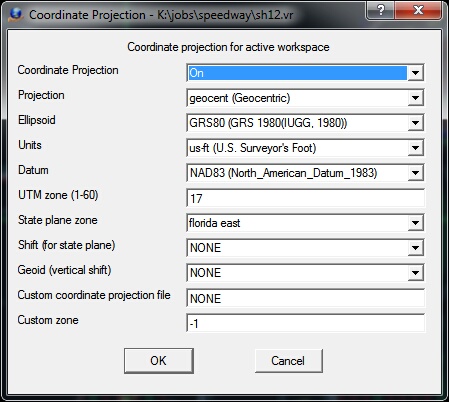
Example VrOne fie coordinate projection definition
Drive KML Menu Keys
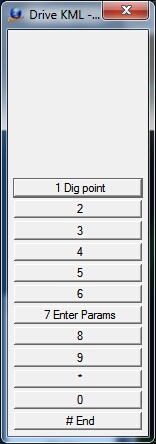
Menu Keys
1 - Dig Point - Digitizes "drive to" point and starts the KML program which to drive to the point specified.
7 - Enter Parameters - Allows entry/edit of parameters
# - End - Ends application
Parameters
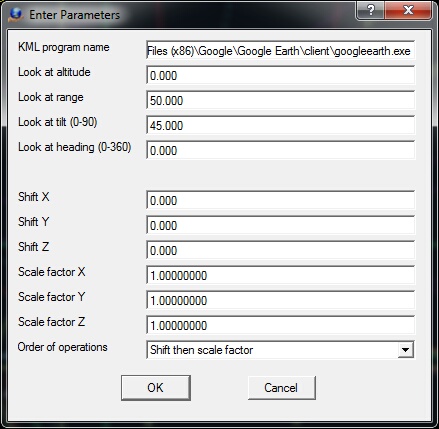
Drive KML parameters
KML program name
When a "drive to" point is digitized in Drive KML, program specified in this field is started and the defined coordinate position is driven to. The program name and path must be specified. Default: C:\Program Files (x86)\Google\Google Earth\client\googleearth.exe
Look at altitude
The distance above the surface in meters. Default: 0
Look at range
The distance from the eye point to the "drive to" point in meters. Default: 400
Look at tilt (0-90)
The angle between the direction of the position and the normal to the surface in degrees. An angle of zero will view the "drive to" point from an ortho position or a position directly above. The range is 0 to 90. Default: 45
Look at heading (0-360)
The viewing azimuth about the Z axis in clockwise degrees. Default: 0
Shift X, Shift Y, Shift Z
Shift value for the Y, Y and Z axis before converting the coordinates to KLM. This value is in the VrOne coordinate system. A value of 0.0 is no shift. Default: 0.0
Scale factor X, Scale factor Y, Scale factor Z
Scale factor for the Z axis before converting the coordinate to KLM. A value of 1.0 is no scale factor. Default: 1.0
Order of operations
Defines the order to apply the shift and scale factor values to the local coordinates before converting to KLM. Options are "Shift then scale factor" or "Scale factor then shift". Default: "Shift then scale factor"
Google and the Google logo are registered trademarks of Google Inc.