Vr Mapping |
ON-LINE REFERENCE DOCUMENTATION CARDINAL SYSTEMS, LLC |
Edit Camera
Edits and new or existing Vr camera (.cam) file.
UltraCam Lenses
Overview
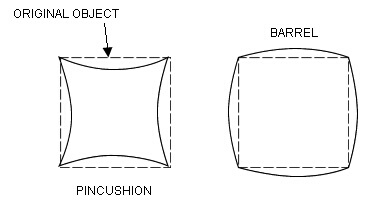
The camera calibration parameters relates the ideal model of a camera to the actual physical device. Information about the camera must be known in order to make accurate measurements. This information includes focal length, principal point scale factor and lens distortion. A simple example of lens distortion is apparent when you take an image of an object with straight vertical or horizontal lines and the lines appear curved in the image. This is called the “barrel” or “fish-eye” effect and is more apparent on lenses with shorter focal lengths. These parameters are so important that aerial mapping companies spend between 300,000 and 1.5 million dollars on specially built cameras that hold these parameters in check.
Please see Vr Camera Calibration for more information about Vr Mapping's camera calibration program.
Parameters
There are two camera types which are digital or scanned film. Digital cameras typically do not have fiducials. The selection of a camera type determines the parameters to be entered with scanned film requiring the entry of fiducial coordinates. The first step in defining camera parameters is to select a camera type.
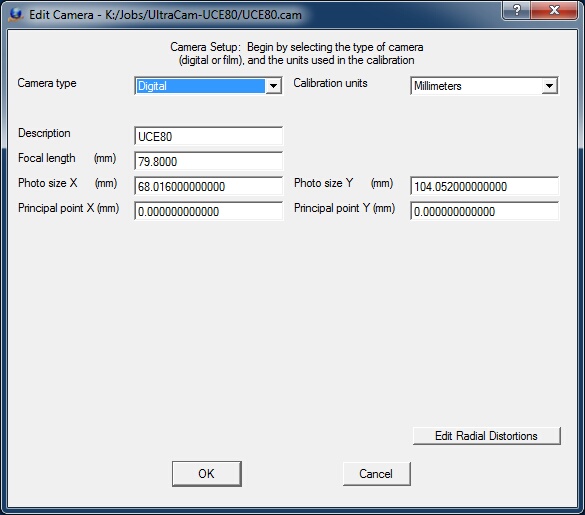
Digital edit camera dialog
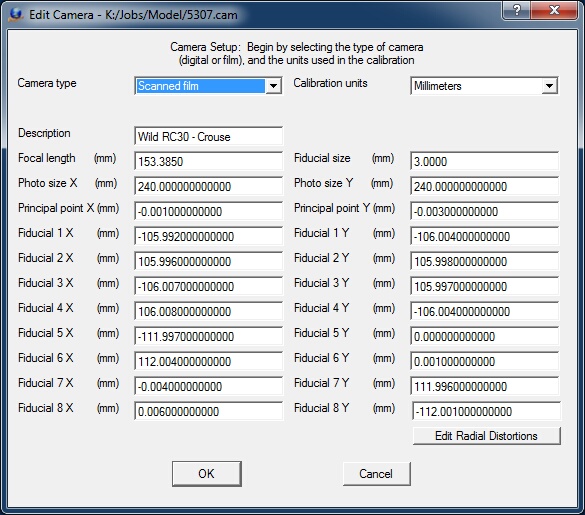
Scanned film camera dialog
Camera type
The camera type determines the parameters to be entered with a camera type of Scanned film requiring the entry of fiducial coordinates. Options for camera type are Digital and Scanned film.
Calibration units
Specifies the camera calibration units which apply to fiducial coordinates and focal length. Options are millimeters, inches, or pixels. Many programs used to calibrate handheld cameras, include Vr Camera Calibration output the focal length of the camera in pixels. The coordinates entered to represent the fiducial positions must be in the same units as those specified here.
Focal length
Defines the camera lens' focal length, the distance from the focal point to the center of the lens. This value is provided by the camera calibration report. Focal length units should in the same units as the Calibration units.
Photo Size X Y
Specifies image dimensions. Photo size dimensions should be in the same units as the Calibration units.
Principal point X Y
Specifies the calibrated principal point (also known as the point of best symmetry). This coordinate position is available from the camera calibration report. Calibrated principal point coordinate units should be in the same units as the Calibration units.
Fiducial (1-8) X Y
The entry/edit of the fiducial coordinates is available when the "Scanned film" is selected as the "Camera type". The coordinate positions for up to eight fiducials may be entered and must be in the Calibration units. These eight parameters are available when the Camera type is set to Scanned film. Most aerial cameras have eight fiducials. It is strongly recommended that all eight be entered and used to compute interior orientation. If only four fiducials are used, errors may occur and make residuals useless in determining if the wrong camera calibration was selected.
Edit Radial Distortions
Allows the entry/edit of radial distortion parameters (see Radial Distortions below)
Reset
Resets the radial distortion parameters to their default values.
Radial Distortions
Lens distortion causes image positions to be displaced from their ideal or true locations. In aerial cameras, these distortions are normally minimal but they can still have an effect on accuracy. Some cameras, especially hand-held and lower cost cameras, have large lens distortions and the radial distortions must be entered for accurate mapping results.
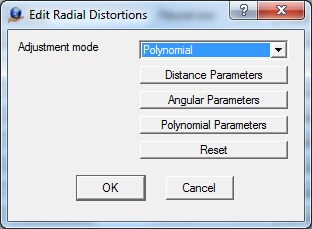
Edit radial distortions dialog
Adjustment mode
Most camera calibration programs output radial distortion values as polynomial parameters. Though angular parameters are listed, this output type is currently unsupported.
Distance Parameters
Radial distortions, represented by concentric rings about the camera lens' calibrated principal point, may be entered as distance parameters. The radial distortions shown below are from a small format camera and show high radial distortion values.
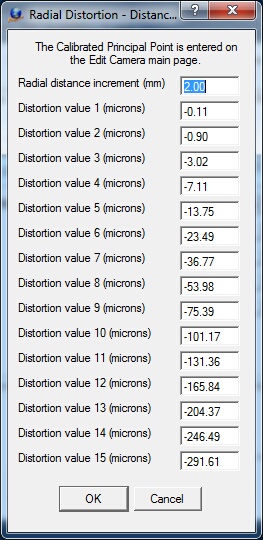
Radial distortion - Distance parameters
Radial distance increment
Represents the distance between the concentric rings that make up the distance parameters. Radial distance increment units should be the same as those used for Fiducial positions.
Distortion value (1-15)
Specifies distortion values for each distance. There may be up to 15 values. Distortion value units should be the same as those used for Fiducial positions.
Angular Parameters
Computation of radial distortions by angular parameters is currently unsupported. Please use distance or polynomial parameters.
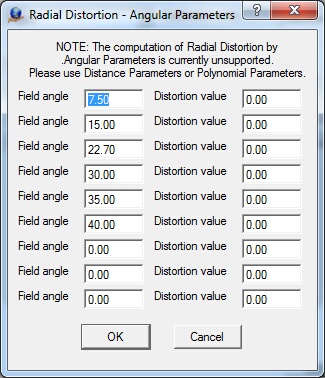
Radial distortion - Angular parameters
Polynomial Parameters
The polynomial values and principal point or auto collimation are provided by the camera calibration report. The mathematical model used is based on the Simultaneous Multi-camera Analytical Calibration (SMAC) method. Care should be taken when entering these parameters, as entry errors cause model orientation errors and distortions which affect model accuracy.
Entry of Exponential Notation
The k0-k4 values and the p1-p4 values are entered into the Polynomial Parameters dialog box in exponential notation. The values entered from the camera calibration report may have the decimal place moved one position to the left depending on the number entered. For example:
Camera calibration report value: 0.1403x10-3
Value typed: .1043e-3
Shown value: 1.403000e-004
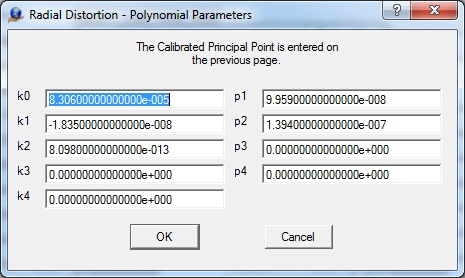
Radial distortion - Polynomial parameters
K0-K4
Defines up to five K coefficient values. These are coefficients of symmetric radial lens distortion from the camera calibration report. These values are entered in exponent form.
P1-P4
Defines to four P coefficient values. These are the coefficients of de-centering distortion from the camera calibration report. These values are entered in exponent form.