Vr Mapping |
ON-LINE REFERENCE DOCUMENTATION CARDINAL SYSTEMS, LLC |
Keypoint (KeyPoi)
Type: Batch Application
A LiDAR point thinning method that generates keypoints by identifying existing VrPoints (LiDAR) as keypoints.
Detailed Description
Keypoints or model points are used to thin LiDAR datasets by identifying points in flat areas that represent other LiDAR points nearby that are within the same user defined elevation tolerance. In the process of generating keypoints, new points are not created but existing points have their keypoint flag conditioned.
The resulting keypoint data along with optional break-line data is better suited to the creation of Digital Terrain Models (DTM) due to the reduction of the amount of input points and better point spacing for improved cartographic contour generation.
The keypoint process should be run on LiDAR points that have been classified as ground points. Keypoint generation does not produce favorable results when features such as vegetation and buildings are considered in the input data. The display and definition of ground points as input to Keypoint (KeyPoi) can be defined by setting the display of Ground points in the Classification Filter in Point Display (EdiPoi or PO). The display of only keypoints can also be defined in Point Display.
Keypoint considers and modifies the keypoint attribute of the VrOne database entity type VrPoint (LiDAR).
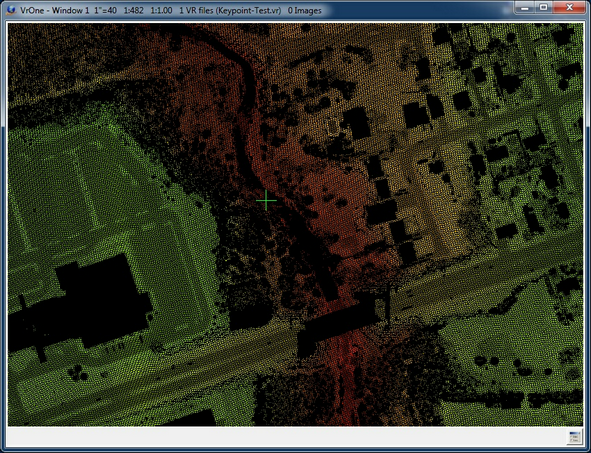
Original bare earth (ground) LiDAR point data
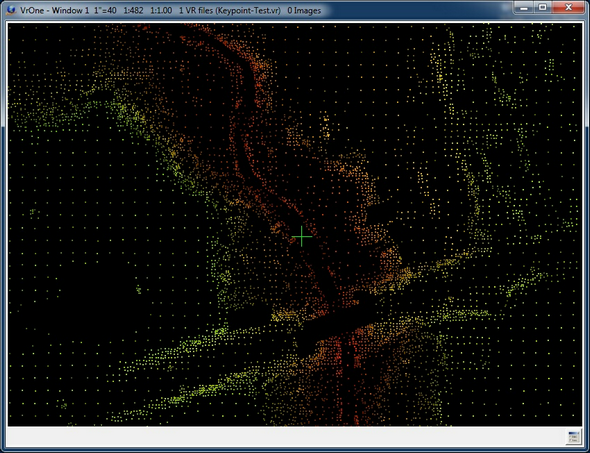
Results of keypoint generation using bare earth (ground) as input
Available Key-ins
Key-in |
Description |
Range |
RUN |
Run Keypoint |
|
Starting Keypoint with a key-in of "KeyPoi RUN" will run the batch application without prompting for parameters. The previous parameters will be used. It is possible to set the initial parameters by starting Keypoint (KeyPoi) with no arguments, entering parameters then pressing Cancel. The parameters will be saved as the previous parameters.
Method
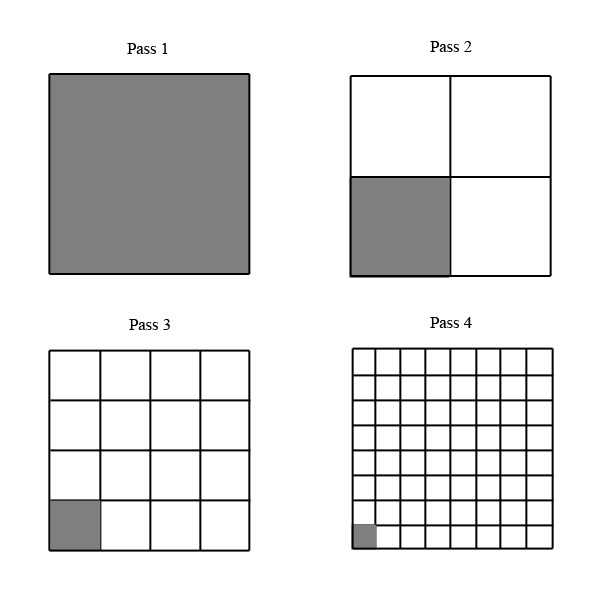
A user defined grid increment, called a zone, is iterated over the LiDAR point data and up to four passes are made per grid increment. The points that fall within this area are examined. If the elevation range of these points are within a user defined elevation tolerance, the LiDAR point nearest to the center of the zone has it's keypoint flag set and processing stops for that zone.
If the elevation range of the points within the current zone is out of range then the zone is subdivided into four zones and the smaller zone is analyzed. This process continues until the elevation range of the zone falls within the tolerance or four passes are complete. If four passes are completed and the elevation tolerance is not met then a user defined action is taken for the pass 4 zone. This process continues until all zones are processed. Depending on the user defined parameters and the type of terrain, as few as one pass or as many as 64 passes are used.
Parameters for Keypoint
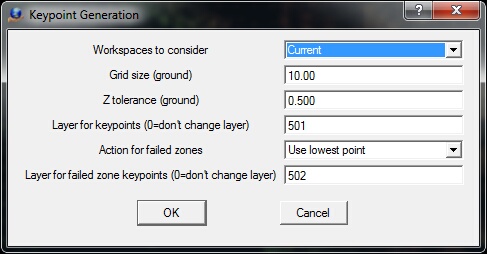
Parameters for keypoint generation
Workspaces to consider
Defines the workspaces to consider when running Keypoint. Options are Current or All open.
Grid size (ground)
Defines the grid size for the zone for pass 1. This parameter is entered in ground units.
Z tolerance (ground)
If the elevation range of the current zone is within this tolerance, the closest point to the center of the zone will have it's keypoint attribute set. This parameter is entered in ground units.
Layer for keypoints (0=don't change layer)
Points that are defined as keypoints may be placed in the layer defined by this parameter. If the layer is set to 0 then the layer of the keypoints is not changed.
Action for failed zones
Up to four passes are made to attempt to determine a keypoint as defined by the Grid size and Z tolerance. If the elevation range of the final pass (pass 4) is outside the Z tolerance then the action defined by this parameter is taken. Options are:
| • | Nothing - A keypoint is not defined; |
| • | Use lowest point - The lowest point in the zone is defined as the keypoint; |
| • | Use highest point - The highest point in the zone is defined as the keypoint; |
| • | Use mean point - The point closest to the mean elevation of the zone is defined as the keypoint. |
Layer for failed zone keypoints (0=don't change layer)
Points that are defined as keypoints as a result of the Z tolerance being less than the pass 4 zone elevation range may be placed in the layer defined by this parameter. If the layer is set to 0, the layer of the keypoints is not changed.