Vr Mapping |
ON-LINE REFERENCE DOCUMENTATION CARDINAL SYSTEMS, LLC |
LAS In (LasIn)
Type: Translator
Translates LAS (LiDAR Archive Standard) files to VrOne files.
The LAS file format is a public file format for interchanging LiDAR data between computer systems. This binary file format consists of point coordinate data along with up to 16 attributes per point. The LAS In and LAS Out translators maintain these attributes in the Vr Mapping database. The translation of LAS data to and from the Vr Mapping database requires very few parameters. The LAS translators are based on the LAS Specification Version 1.2 and the LAS Specification Version 1.4. The support of version 1.4 was added in Vr Mapping version 05.09.00. Please see LAS Version 1.2 and LAS Version 1.4 Support for more information. Support for the import of compressed LAS (LAZ) files was added in Vr Mapping Version 06.00.06.
LiDAR points are stored as Vr Points and maintain LAS defined point attributes.
Loads previously recorded LAS In (.lap) parameter file.
Records current translation parameters to a LAS In (.lap) parameter file.
Allows all LAS input files to be selected. Also allows a VrOne output file to be defined for each input file. Looks for files with an extension of .las and .laz by default, but attempts to read in any file chosen. The type of file, uncompressed (.las) or compressed (.laz) is determined by the file name extension (.las or .laz).
The VrOne output filenames are only used if the "Translate to separate VrOne files" option is on.
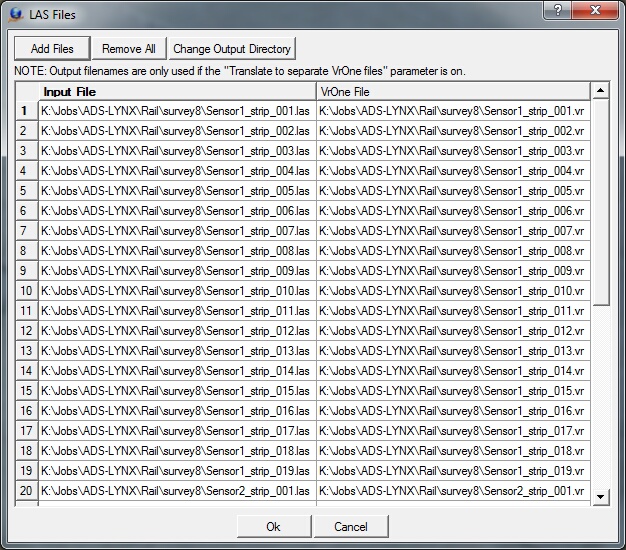
The Define Input Filenames dialog box
Add Files
Displays a standard VrOne file selection dialog. All files selected are added to the list of Input files. A VrOne output filename is generated based on each input filename.
Remove All
Removes all files from the Input file table.
Change Output Directory
Allows changing the output directory (folder). By default, the output directory is the same as the input file directory.
Allows editing general translation parameters.
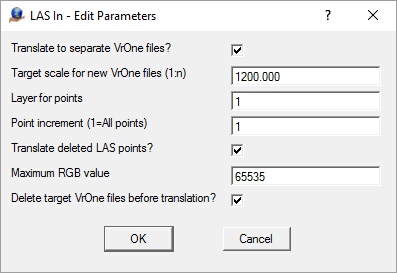
The Edit Parameters dialog Box
Translate to separate VrOne files?
Determines whether to translate each LAS input file to a separate VrOne file. The Input to Output filename cross-reference is set in the "Define Input Filenames" dialog.
Target scale for new VrOne files (1:n)
Defines target scale to use when creating the new VrOne file if the "Translate to separate VrOne files?" is on and a VrOne file does not exist during translation.
Layer for points
Specifies layer into which to place translated points.
Translate deleted LAS points?
One of the attributes stored with each LiDAR points is a delete flag, which allows points in the database to be marked as deleted. If this parameter is selected, deleted points are translated. Deleted points that are translated retain their delete flag in the Vr Mapping database.
Maximum RGB value
Defines the maximum RGB values that are expected in the LAS file. The Vr Point structure defines the RGB range as 0-255. If the Maximum RGB value is greater than 255, incoming RGB files are scaled to the range of 0-255.
Delete target VrOne files before translation?
If this option is checked each target VrOne file will be deleted before translation if it exists. If this option is unchecked and the target VrOne file exists, the new data will be appended to the file. This parameter is considered only if the "Translate to separate VrOne files" option is checked.
Scans the currently defined LAS files and displays various information including coordinate, intensity and RGB ranges.
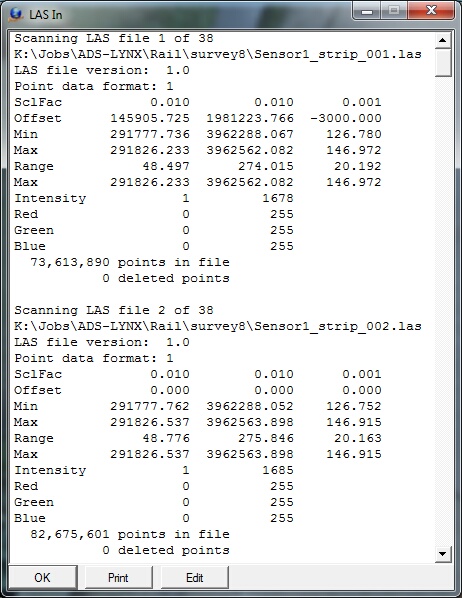
The Scan Files information box
Begins the file translation process. All files defined by the “Define input Filenames” option are imported.
The Translation information box
Starts the browser and displays the current help document.
Quits LAS In and allows current parameters to be saved if they were altered.
LAS Version 1.2 and LAS Version 1.4 Support
LAS 1.2 and LAS 1.4
For more information on the supported LAS formats please see:
Overview of Changes in 1.4
Following is an overview of the changes from LAS 1.2 to LAS 1.4. This list does not include all the differences. Please see the LAS format specifications for more details.
| • | The number of returns per LiDAR pulse and the return number has been extended from 5 to 15. |
| • | The sensor number is now included in version 1.4 and has a range from 0 to 3. |
| • | The overlap flag has been added. |
| • | The number of point classifications has been extended from 32 to 256. |
| • | The Near Infrared Channel (NIR) field has been added. |
| • | The scan angle is now defined with a range of -30,000 to 30,000 with a resolution of 0.006 degrees. |
Supported Point Data Records
LAS 1.4 supports waveform data, however the Vr Mapping LAS translators does not support this data so the LAS Point Data Record formats 4, 5, 9 and 10 are not supported. LAS 1.4 consists of 11 Point Data Record formats. Formats 0-3 are legacy formats from version 1.2 which are still supported and formats 6-8 are defined in the 1.4 specification. For more details on each of the supported point formats, please see the LAS format specifications in the LAS documentation listed above. Following are the record formats supported by Vr Mapping.
| • | Format 0 (LAS 1.2) - X, Y, Z, Intensity, Return Number, Number of Returns, Scan Direction Flag, Edge of Flight Flag, Classification, Scan Angle Rank, User Data, Point Source ID |
| • | Format 1 (LAS 1.2) - X, Y, Z, Intensity, Return Number, Number of Returns, Scan Direction Flag, Edge of Flight Flag, Classification, Scan Angle Rank, User Data, Point Source ID, GPS Time |
| • | Format 2 (LAS 1.2) - X, Y, Z, Intensity, Return Number, Number of Returns, Scan Direction Flag, Edge of Flight Flag, Classification, Scan Angle Rank, User Data, Point Source ID, Red, Green, Blue |
| • | Format 3 (LAS 1.2) - X, Y, Z, Intensity, Return Number, Number of Returns, Scan Direction Flag, Edge of Flight Flag, Classification, Scan Angle Rank, User Data, Point Source ID, GPS Time, Red, Green, Blue |
| • | Format 6 (LAS 1.4) - X, Y, Z, Intensity, Return Number, Number of Returns, Scan Direction Flag, Edge of Flight Flag, Classification, Scan Angle Rank, User Data, Point Source ID, Overlap flag, Sensor number, GPS Time |
| • | Format 7 (LAS 1.4) - X, Y, Z, Intensity, Return Number, Number of Returns, Scan Direction Flag, Edge of Flight Flag, Classification, Scan Angle Rank, User Data, Point Source ID, Overlap flag, Sensor number,GPS Time, Red, Green, Blue |
| • | Format 8 (LAS 1.4) - X, Y, Z, Intensity, Return Number, Number of Returns, Scan Direction Flag, Edge of Flight Flag, Classification, Scan Angle Rank, User Data, Point Source ID, Overlap flag, Sensor number,GPS Time, Red, Green, Blue, Near Infrared Channel (NIR) |
Additions and Modifications to the LAS Specification
| • | Vr Mapping contains a layer number for each point (1-32001) |
| • | Vr Mapping contains a flight number for each point (0-255) |
| • | Vr Mapping contains a display flag for each point (0-1) |
| • | The red, green, and blue values in LAS point data record formats 2, 3, 7, and 8 are defined with a range of 0-65535 (6 bytes). Vr Mapping scales these values to 0-255 (3 bytes) |
| • | LAS version 1.4 waveform data is not supported so LAS Point Data Record formats 4, 5, 9 and 10 are not supported. |
| • | LAS version 1.4 specifies the maximum number of points in an LAS file to be up to18 quintillion (18,446,744,073,709,551,615). Currently, Vr Mapping supports the LAS 1.2 specification which allows point counts up to 4 billion (4,294,967,295). |
Updated: May 2019